6月16日,梅賽德斯-奔馳官方宣布將車載語音助手接入ChatGPT。即日起,超90萬美國客戶可通過Mercedes me手機應用或語音“Hey,Mercedes”參與MBUX智能人機交互系統測試計劃。
汽車是大模型最大的交互應用場景,這是ChatGPT第一次應用在汽車環境中。這一測試的結果將被用於進一步完善語音助手,爲更多市場的大型語言模型提供參考,因爲ChatGPT的接入,智能汽車操作系統也將被重塑。

除了奔馳,衆多企業也在關注和探索大模型在汽車上的應用,包括特斯拉、英偉達、百度、阿裏等。人工智能和汽車的結合是國內外的迫切發展方向,沒有公司會愿意在人工智能引領的又一次革新中掉隊。
而在人人都談論AI的今天,我們也想簡單聊聊人工智能將會對汽車行業帶來怎樣的改變。
更懂你的智能座艙
大模型的出現給人工智能的發展帶來了新的機遇和挑战,也爲汽車行業提供了新的可能性,主要的應用場景包括智能座艙和智能駕駛。
汽車智能座艙是指集成了多種智能化功能和服務的汽車內部空間,它可以通過多模態的人車交互方式,爲駕乘者提供安全、舒適、便捷、娛樂的出行體驗。
人工智能大模型在汽車智能座艙上的應用,首先體現在語音交互方面。
語音交互是智能座艙中最重要的功能之一,它可以讓駕乘者通過自然語言與汽車進行溝通和控制,提高出行的便捷性和安全性。
根據汽車智能化研究機構汽勢科技的數據,2023年上海車展上,搭載語音交互功能的車型佔比達到了95%,其中奔馳的語音交互搭載率排名第一。

而奔馳之所以能在語音交互方面領先,與其採用了ChatGPT技術有關。奔馳將ChatGPT整合到其MBUX智能人機交互系統中,爲車主提供了全新的語音助手體驗。該系統將支持更動態的對話,它不僅可以准確理解車主的語音命令,還可以與車主進行交互式對話。
其次便是圖像分析方面。圖像大模型可以爲汽車智能座艙提供面部識別、情緒分析、AR相機等服務,讓駕乘者可以通過圖像與汽車進行交互和娛樂。例如,商湯科技發布的圖片生成模型“秒畫SenseMirage”,就可以根據駕乘者的輸入或選擇,生成各種風格和主題的圖片。
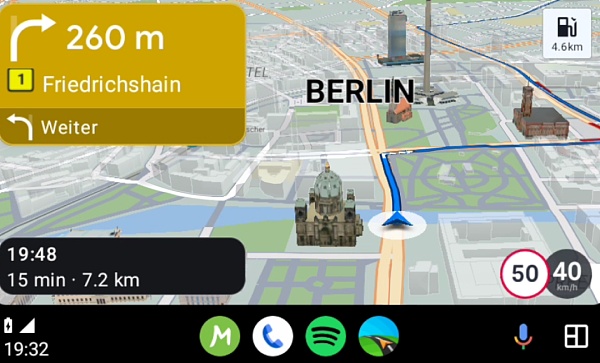
除了語音交互和圖像分析之外,3D內容大模型也可以爲汽車智能座艙賦能,它可以爲其提供3D導航等服務。
總之,人工智能大模型在汽車智能座艙上的應用,可以讓汽車具有更強的感知、理解、生成、交互等能力,從而爲駕乘者提供更加智能化、個性化、場景化的出行體驗。
這是一場正在發生的交互革命,而這場革命還離不开未來交通行業的另一個重要發展方向——自動駕駛。
自動駕駛再提速
自動駕駛技術是未來交通行業的重要發展方向,而AI是實現自動駕駛技術的關鍵技術之一。自動駕駛是指通過計算機系統的感知、決策和執行,實現車輛在不同程度上替代人類駕駛者的技術。
根據國際汽車工程師協會(SAE)的標准,自動駕駛可以分爲六個級別,從L0到L5,分別代表不同的自動化程度和人機交互方式,L0-L2屬於駕駛輔助,L4-L5才算自動駕駛。
而我們目前最高到L3級,即借助人工智能,車輛可以處理所有駕駛任務,但在緊急情況或者其他類似系統故障的情況下,仍需要駕駛員在場。

◉ 自動駕駛L0-L5
L0級,人工駕駛;
L1級,輔助駕駛,是指車輛可以提供部分輔助功能,但仍然需要駕駛員時刻監控周圍環境,並隨時准備接管車輛;
L2級,部分自動駕駛,是指車輛可以提供多項輔助功能,例如同時具備AIGC和LKA的高級駕駛輔助系統(ADAS);
L3級,有條件自動駕駛,車輛可以在特定的場景和條件下完成所有的駕駛操作和周圍環境監控,但需要在系統要求時由人類提供適當的應答;
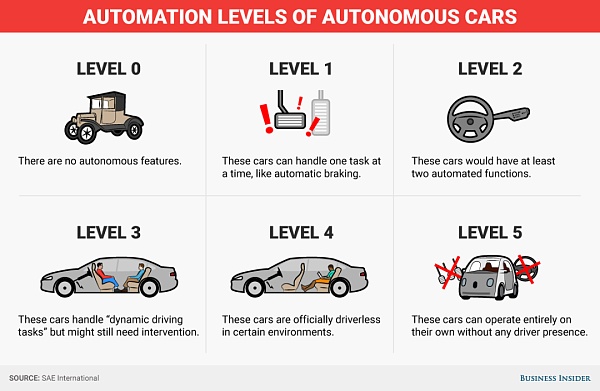
L4級,高度自動駕駛,是指車輛可以在特定的場景和條件下(例如無人物流、無人微公交、自主泊車等)完成所有的駕駛操作和周圍環境監控,並且不需要人類提供任何應答。此時,車內無需配備安全駕駛員,但仍然限定道路和環境條件;
L5級,完全自動駕駛,此時的車內無需配備安全駕駛員,也不限定道路和環境條件。
◉ 技術原理
自動駕駛採用計算機自主學習、高精度地圖、定位、網絡通信和激光雷達等信息技術,在車輛自動行駛過程中,利用環境感知、自動決策和控制等技術,對道路行駛條件、行駛過程中可能遇到的障礙及危險進行有效的控制和避免,並對各種復雜環境和突發狀況採取行之有效的措施。它的基本原理包括了感知、決策、控制三方面。

感知是自動駕駛的基礎,是實現決策和控制的前提。感知是通過毫米波雷達、激光雷達、攝像頭,對車輛周圍環境進行精准識別,自主避讓前方障礙物,進行自動轉向。
決策是指車輛根據感知到的信息,通過智能算法和模型,進行規劃和判斷,確定合適的工作模式和控制策略,代替人類做出駕駛決策。決策主要依賴於芯片和軟件,是自動駕駛的核心,包括路徑規劃、行爲規劃、軌跡規劃、交互規劃等。
控制是自動駕駛的實現,是感知和決策的結果。它是指車輛根據決策輸出的指令,通過线控系統或機械系統,對車輛進行相應的操作執行,如轉向、加速、減速、制動等。
控制主要包括兩個方面:縱向控制和橫向控制。前一個控制車輛在行進方向上的速度和加速度,主要涉及油門和制動系統;後一個控制車輛在垂直於行進方向上的位置和角度,主要涉及轉向系統。
◉ 應用層面
人工智能的發展顯著提高了自主駕駛系統的能力。通過機器學習算法、計算機視覺和傳感器融合技術的結合,系統能夠理解周圍環境並對其做出反應,變得更加可靠、高效和安全。
想要利用人工智能實現徹底改變駕駛方式,主要是看自動駕駛領域的應用層面,包括環境感知、決策規劃、學習適應三個重要部分。
自動駕駛車輛結合了攝像頭、激光雷達、雷達和其他傳感器來收集周圍環境的數據。接着,人工智能算法將對這些數據進行處理,以創建詳細的環境地圖,並識別物體,如行人、其他車輛、紅綠燈和路標,決定車輛該如何響應。而類似GDDR6的高速存儲器可以支持快速存儲和訪問數據,實現密集型計算。
而自動駕駛汽車使用人工智能根據從傳感器收集的數據能做出實時決策。例如,如果自動駕駛汽車檢測到行人橫穿馬路,它將使用人工智能來確定最佳行動方案,進行減速或停車。

同時,預測建模與監督學習算法能實現預測其他道路使用者的行爲,例如行人在特定位置橫穿馬路和其他車輛變道的可能。這有助於汽車預測潛在的交通問題,並採取適當的行動來避免。
而無監督學習算法可用於識別自動駕駛汽車傳感器收集的數據中的異常或意外事件,例如在意外位置橫穿道路的行人或突然變道的車輛。
自動駕駛系統還可以利用機器學習和深度學習技術不斷優化自身性能。通過不斷收集和分析駕駛數據,系統可以學習和適應不同的駕駛場景,改進自己的決策能力和反應速度。
此外,強化學習技術也在自動駕駛領域發揮着重要的作用。通過強化學習,車輛可以在實際駕駛環境中不斷試錯和學習,優化其駕駛策略和決策能力。
未來駛向何方?
汽車在當代社會是人類出行必不可少的交通工具與社會發展的經濟引擎。隨着人工智能技術的不斷進步,自動駕駛技術將逐漸商業化並進一步普及。

也有一種觀點認爲,汽車也有望成爲智能移動終端的一部分。人工智能和互聯網的發展爲汽車提供了與其他智能移動終端進行交互的能力。我們的智能生活也會因爲汽車的移動私人空間屬性,而變得更具有擴展性與獨特性。
作爲全球市值最高的車企,特斯拉大力推行自動駕駛,勢必要將autonomy進行到底。國內百度CEO李彥宏也表示,隨時都在發生的正常車禍不是新聞,而自動駕駛的車禍就成了新聞,究其根本原因是無人駕駛還未普及。
當然,智能駕駛產業鏈的確還需要完善政策、成本、技術、保險等各方面因素存在的問題。但自動駕駛技術的前景一片光明,我們的出行生活也期待變得更加智能與安全。
【聲明】:本文爲元宇宙之心運營團隊原創,未經允許嚴禁轉載,如需轉載請聯系我們,文章版權和最終解釋權歸元宇宙之心所有。
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播信息之目的,不構成任何投資建議,如有侵權行為,請第一時間聯絡我們修改或刪除,多謝。